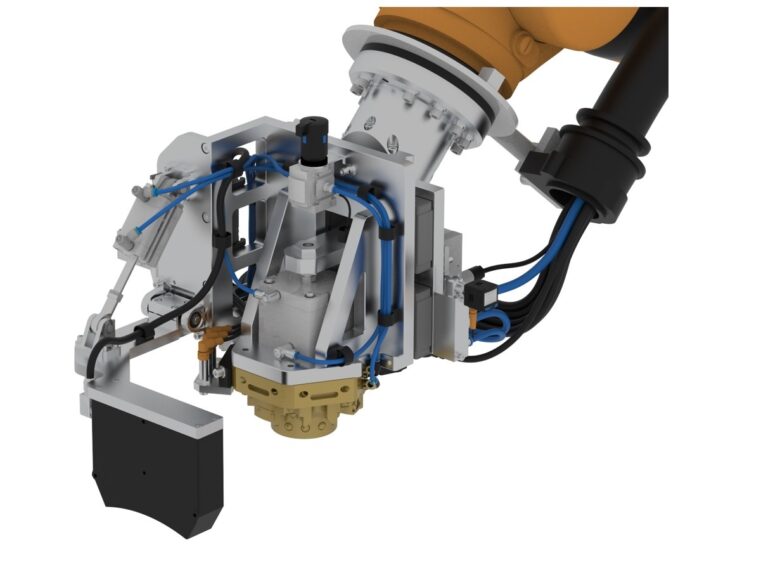
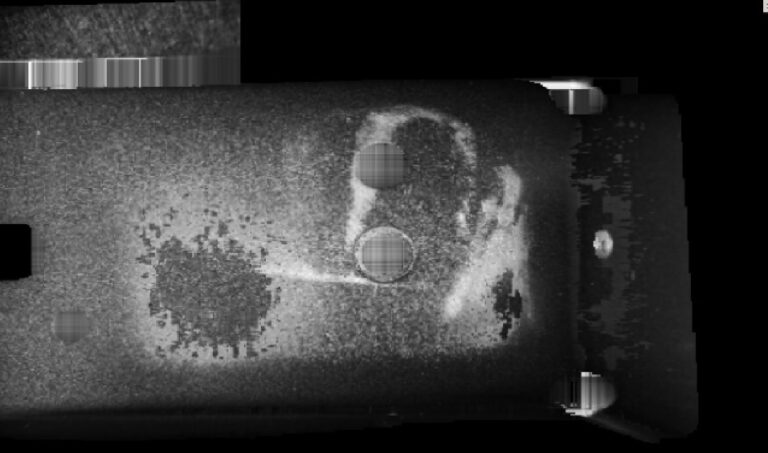
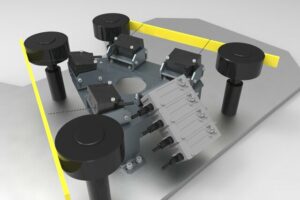
Nach dem Stempeln der Fahrgestellnummer wird die Nummer mit den Reinigungsbürsten durchlaufen und mit einer Blasdüse mit Luftdruck gereinigt. Nach der Reinigung bewegt sich der Roboter mit der Kamera über die geprägte Fahrgestellnummer, erfasst das Ergebnis der Prägung und die Bilder mit der geprägten Fahrgestellnummer werden im Archiv gespeichert.
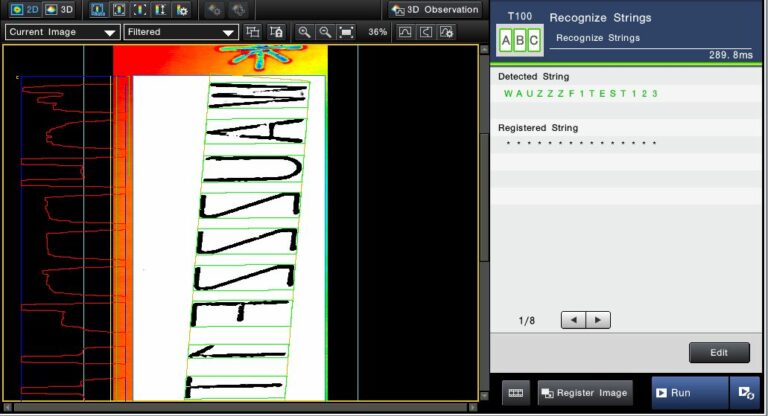
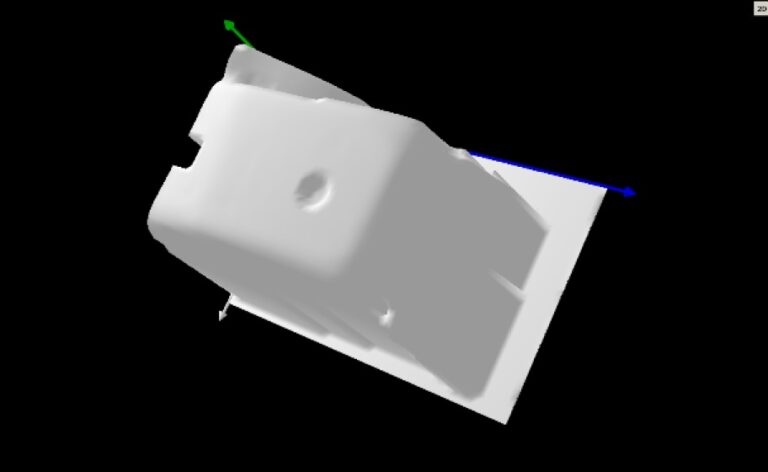
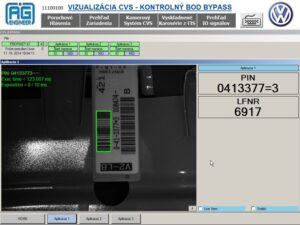
Beim Stempeln des Audi Q8 führt das Kamerasystem vor dem Stempeln zwei Messungen durch. Es steuert einen großen Bereich, auf den die Fahrgestellnummer gestempelt ist, und einen kleinen Bereich – die Auflagefläche für den Stempelkopf. Während der Aufnahme wird das Kamerasystem im Q8-Gehäuse nicht über einen Pneumatikzylinder gekippt – dies ist nicht erforderlich, da sich der Stanzpunkt auf einem Balken unter dem Sitz befindet. Die Kamera ist an einen PC angeschlossen, auf dem die Anwendung VisionAGE VIN H3 ausgeführt wird.
Die Anwendung bietet Kommunikation mit der Kamera und Auswertung von Messungen. Die Hauptelemente der Anwendung sind das Anzeigefeld, die Zeile mit Statusanzeigen und das Bedienfeld mit Informationen zum Körper und zum Kameraprogramm.